可使控制速度,位置精度非常准确,可以将电压信号转化为转矩和转速以驱动控制对象。转子转速受输入信号控制,并能快速反应,在自动控制系统中,用作执行元件,且具有机电时间常数小、线性度高、始动电压等特性,可把所收到的电信号转换成电动机轴上的角位移或角速度输出。分为直流和交流电动机两大类,其主要特征是,当信号电压为零时无自转现象,转速随着转矩的增加而匀速下降。

直流伺服电动机也有电磁式和永磁式两种,但多为永磁式。它的良好控制性能主要是由于具有特殊的转子结构。根据其结构的不同,直流伺服电动机有以下的几种类型。
这种伺服电动机具有与动力直流电动机基本相同的结构。即电磁式或永磁式定子,转子由带槽的铁心和嵌放于槽中的电枢绕组构成。但相对而言,电枢的长度与直径比较大,即它属细而长型转子。大中容量的直流伺服电动机一般都是这种结构,产品容量从几瓦到几百瓦甚至数千瓦。同时也由于这种转子结构,使它具有较强的负载能力,较大的堵转转矩,因此它特别实用于大负载的伺服系统。但由于转子结构较为复杂、体积较大,使得该电动机的机械惯性(时间常数)较大,低速时运行平稳性较差,控制死区较大。
这种电动机定子为永磁式。它的转子为一圆盘结构(即长度直径比小于1),电枢有线绕式(线绕盘式)和印刷电路式(印刷盘式)之分。该电动机结构相对比较简单、体积小、转子重量轻,因此,转子的机械惯性小(通常机种的机械时间常数小于30眦),但堵转转矩小。线绕盘式电动机容量可达数千瓦,印刷盘式的容量小一些。
该电动机转子以一空心杯构体为骨架,其杯壁上放置(或印制)电枢绕组。其电枢绕组可以是绕线式绕组也可以是印刷式绕组。定子为永磁式。这种伺服电动机以机械惯性极小著称,控制灵敏度较高,几乎无控制死区,其体积可做得很小且重量轻。但堵转转矩较小,目前它的容量还不能做得很大,是一种微型伺服电动机。
无槽电枢直流伺服电动机与普通电枢直流伺服电动机的唯一区别是它的转子铁心不开槽,电枢绕组用固定胶粘贴在电枢表面。这种伺服电动机具有较大的负载能力,较大的堵转转矩,电动机容量能做的较大,低速平稳性好。
这种伺服电动机是将微型直流电动机和一套高精度齿轮减速装置组装成一整体。直流伺服电动机的输出转速经过减速机构减速输出。因此,这种电动机的最大特点是可以输出极低的速度(可低达零点几转每分)且低速时运行非常平稳。它非常适合于低速大力矩系统。
直流力矩电动机是一种低速大力矩伺服电动机。它能在不需要中间减速机构的情况下直接拖动负载实现低速大力矩的平稳运行,还可以工作在堵转情况下且无爬行现象,又具有很高的稳速精度。因此,非常适合于那些常用于较低速度且又有相当负载能力有一定的要求的场合。直流力矩电动机在结构上和普通电枢直流伺服电动机相同。它的定子主磁极数较多(通常6。8极),它通常做成扁平结构,电枢长度与直径之比一般仅为0.2左右(即外表呈现圆盘状)。它有内装式和分装式两种结构。内装式与一般电动机一样由生产厂装配成一整体。分装式将定子、转子和刷子三大部分分离出厂,使用时现场装配,转子直接套在负载轴上,机壳可根据自身的需求自行选配。

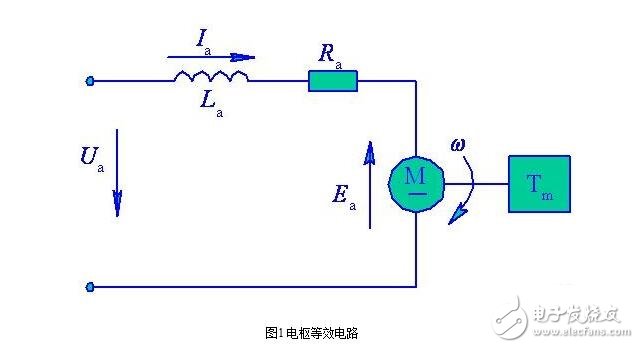
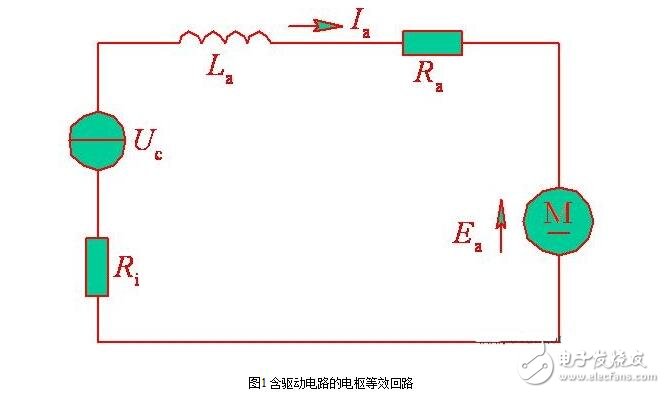
当电动机处于稳态运行时,回路中的电流Ia保持不变,则电枢回路中的电压平衡方程式为
式中,Ea是电枢反电动势; Ua是电枢电压;Ia是电枢电流;Ra是电枢电阻。
转子在磁场中以角速度切割磁力线时,电枢反电动势Ea与角速度之间有如下关系:
式中,Ce是电动势常数,仅与电动机结构有关;是定子磁场中每极的气隙磁通量。

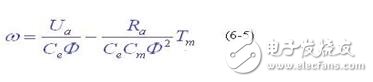
将式(6-4)代入式(6-3)并整理,可得到直流伺服电动机运行特性的一般表达式
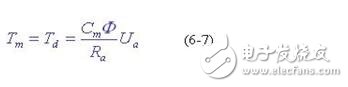
由此能得出空载( Tm=0,转子惯量忽略不计)和电机启动(=0)时的电机特性:

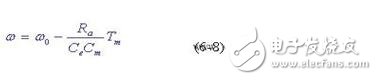
如果把角速度看作是电磁转矩Tm的函数,即=f(Tm),则可得到直流伺服电动机的机械特性表达式为
如果把角速度看作是电枢电压Ua的函数,即=f(Ua),则可得到直流伺服电动机的调节特性表达式
根据式(6-8)和式(6-9),给定不同的Ua值和Tm值,可分别绘出直流伺服电动机的机械特性曲线所示。

由图2可见,直流伺服电动机的机械特性是一组斜率相同的直线簇。每条机械特性和一种电枢电压相对应,与轴的交点是该电枢电压下的理想空载角速度,与Tm轴的交点则是该电枢电压下的启动转矩。
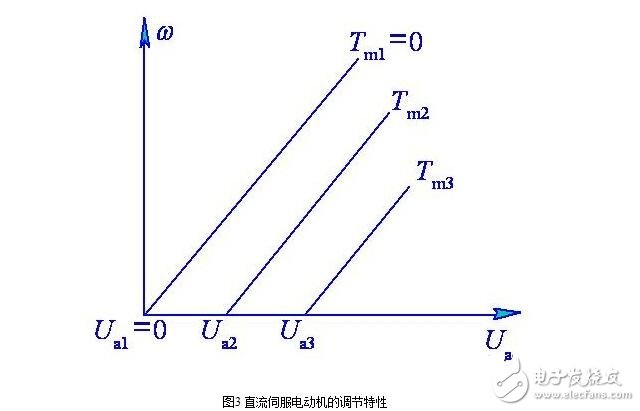
由图3可见,直流伺服电动机的调节特性也是一组斜率相同的直线簇。每条调节特性和一种电磁转矩相对应,与Ua轴的交点是启动时的电枢电压。?
从图中还可看出,调节特性的斜率为正,说明在一定的负载下,电动机转速随电枢电压的增加而增加;而机械特性的斜率为负,说明在电枢电压不变时,电动机转速随负载转矩增加而降低。
对直流伺服电动机特性的分析是在理想条件下进行的,实际上电动机的驱动电路、电动机内部的摩擦及负载的变动等因素都对直流伺服电动机的特性有着不容忽略的影响。
直流伺服电动机是由驱动电路供电的,假设驱动电路的内阻是Ri,加在电枢绕组两端的控制电压是Uc,则可画出如图1所示的电枢等效回路。在这个电枢等效回路中,电压平衡方程式为
由于驱动电路内阻Ri的存在而使机械特性曲线给出了驱动电路内阻影响下的机械特性。
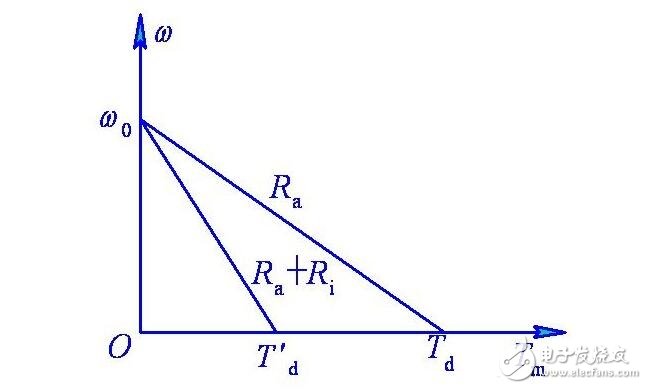
如果直流伺服电动机的机械特性较平缓,则当负载转矩变化时,相应的转速变化较小,这时称直流伺服电动机的机械特性较硬。反之,如果机械特性较陡,当负载转矩变化时,相应的转速变化就较大,则称其机械特性较软。显然,机械特性越硬,电动机的负载能力越强;机械特性越软,负载能力越低。毫无疑问,对直流伺服电动机应用来说,其机械特性越硬越好。由图1可知,由于功放电路内阻的存在而使电动机的机械特性变软了,这种影响是不利的,因而在设计直流伺服电动机功放电路时,应设法减小其内阻。
由图1可知,直流伺服电动机在理想空载时(即Tm1=0),其调节特性曲线从原点开始。但实际上直流伺服电动机内部存在摩擦(如转子与轴承间的摩擦等),直流伺服电动机在启动时需要克服一定的摩擦转矩,因此启动时电枢电压不可能为零。这个不为零的电压叫做启动电压,用Ub表示,如图2所示。
由式(6-5)知,在负载转矩TL不变的条件下,直流伺服电动机角速度与电枢电压成线性关系。但在实际伺服系统中,经常会遇到负载随转速变动的情况,如粘性摩擦阻力是随转速增加而增加的,数字控制机床切削工艺流程中的切削力也是随进给速度变化而变化的。这时由于负载的变动将导致调节特性的非线所示。可见,由于负载变动的影响,当电枢电压Ua增加时,直流伺服电动机角速度的变化率越来越小,这一点在变负载控制时应格外注意。
上一篇:内部物流的速度驱动器

