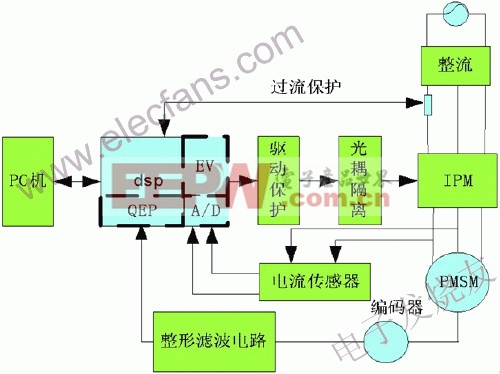
器在高要求的场合现已不可以担任,在许多要求高实时性,高效率的场合,就必须要用专门的算法杂乱或对算法进行改善优化的时分,DSP共同的快速核算的才能就显着的反映出来。也得到了长足的开展。集三相逆变器和维护电路、阻隔电路、能耗制动电路等功能为一体的智能功率模块、先进的电力电子器件的呈现、使操控更便利、功耗更低、开关时间更短、变频规模更宽、功能更优越。这些都使相对直流伺服表现出了显着的优越性。化体系的硬件由DSP作为信号处理器,用旋转编码器和电流传感器供给反应信号,智能功率模块IPM作为逆变器,经传感器出来的信号经过滤波整形等处理后反应给DSP进行运算,DSP经过对参阅信号和反应信号的处理运算来调理伺服体系的电流环,速度环,和方位环的操控,最终输出PWM信号经过阻隔驱动IPM模块完成
体系的操控为三环操控方法,方位操控是外环,也是最终目标,速度操控是中环,电流操控是内环。为了可以更好的确保动态响应速度和定位时不发生震动,电流环和速度环均选用PID调理,方位调理器选用PI调理。体系的操控框图如图2:
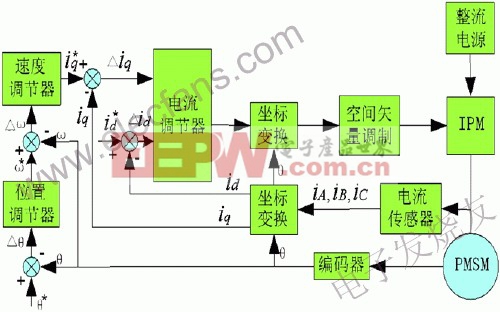
编码器检测的转子方位实践信号与体系给定方位信号作比较,比较后的差值经方位调理器PI调理后输出转子转速给定信号,给定转速信号再与编码器检测的实践速度信号作比较,比较后的差值经速度调理器调理后,输出给定电流指令值,在于电流反应实践值比较后进行PWM操控。在中,励磁磁场与电枢磁通势间的空间视点不是固定的,因而调理电枢电流就不能直接操控电磁转矩。经过的外部操控办理体系,对电枢磁通势相对励磁磁场进行空间定向操控,操控两者之间的视点坚持固定值,一起对电枢电流的幅值也来操控,这种操控方法就称为矢量操控。
