原标题:2019WRC:因时发布新款微型直线伺服驱动器&遥操作双臂移动机器人途径

我国机器人范畴尖端规划、标准最高、国际元素最丰厚的国际会议——WRC2019昨日正式在北京开幕,并同期举行2019国际机器人博览会。国际机器人博览会代表了机器人范畴最新的科技成果和职业开展风向标,邀请了全球机器人范畴的著名企业、高校和科研组织参加展现。因时机器人接连第二年受邀参加博览会,并带来了最新产品。


微型直线伺服驱动器是一种微小型一体化直线伺服体系。其内部集成了空心杯电机、行星减速器、丝杆组织、传感器以及驱动操控器,具有前馈补偿的方位闭环操控和结尾运动规划功用。经典款LA系列微型直线伺服驱动器自面市以来广受好评,本次展会还最新发布了LAS、LAF及LASF三个系列微型直线伺服驱动器。四个系列新产品的特性如下:
LA系列(共轴标准型):电机和丝杆组织旋转中心在一条直线上。特色:全体构型呈细长形,截面尺度较小。
LAS系列(旁轴标准型):电机和丝杆组织的旋转中心不在一条直线上,经过齿轮传动平行安置。特色:全体长度更短,截面尺度稍大。
LAF系列(共轴力控型):在LA系列基础上,增加了力传感器及相应的信号收集滤波算法,能够检测微型直线伺服驱动器实践的受力状况。
LASF系列(旁轴力控型):在LAS系列基础上,增加了力传感器及相应的信号收集滤波算法,能够检测微型直线伺服驱动器实践的受力状况。

遥操作双臂移动机器人途径是由因时机器人联合国承万通、松灵机器人及遨博智能一起打造的一款面向特种使用的机器人开发途径。操控端由动捕体系和力反应外骨骼机械手构成,能够准确收集人体双臂方位信息以及手指的握力信息,并将机器人端的实践受力状况反应到外骨骼机械手,完成力感知与力传递;机器人端由移动底盘、双臂协作机器人和灵活手构成,能够在自主运动和长途遥控两种作业形式进行切换。
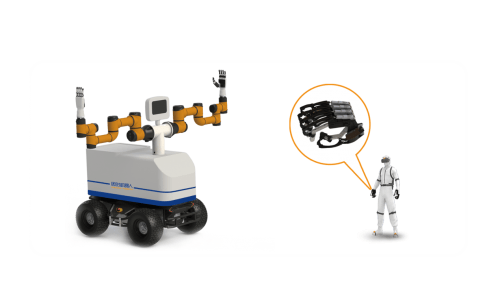
完成遥操作最重要的一个环节是力感知和力操控。力反应外骨骼机械手是一款穿戴式机械手产品,集成微型直线伺服驱动器、视点传感器和力传感器,能够实时收集和操控每一个手指的抓握力。
据悉,因时机器人现在正在招募途径合作伙伴。此次因时发布的几款新品,或许将在职业界引发新一轮评论。咱们也等待因时机器人持续不停地改善改造,给咱们我们带来更多的惊喜。
